Chester
Chester was created for my microprocessor systems capstone course and is a robot whose function is to follow users around and help them carry any items or belongings. It can follow users around using ultra-wideband (UWB) signals and four 50:1 DC geared motors. Chester also has live telemetry available that can be viewed on a webpage created using Firebase.
I worked on this project with four other teammates and my primary responsibilities were creating the UWB location sensing algorithm and designing and creating the entire frame of Chester.
The UWB location sensing was achieved using three DW1000 UWB ESP32 modules as well as a NodeMCU ESP32 devkit whose purpose was to receive data from the UWB modules, perform the location detection algorithm, and issue the appropriate movement commands to the motor to reach the location of the user.

Final version of Chester
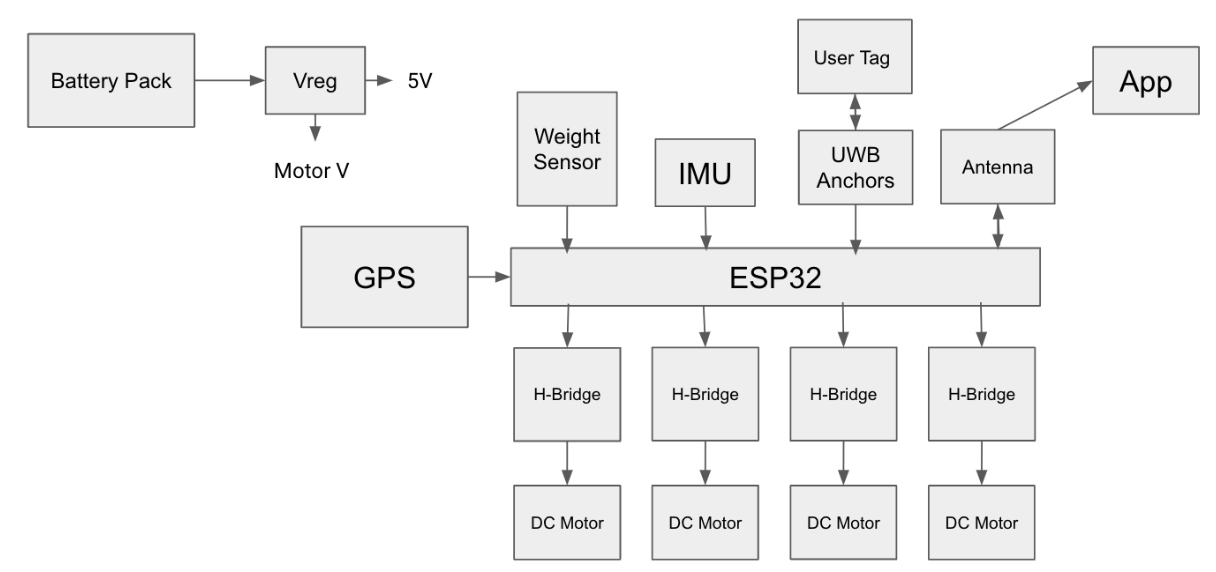
Overall hardware architecture of system
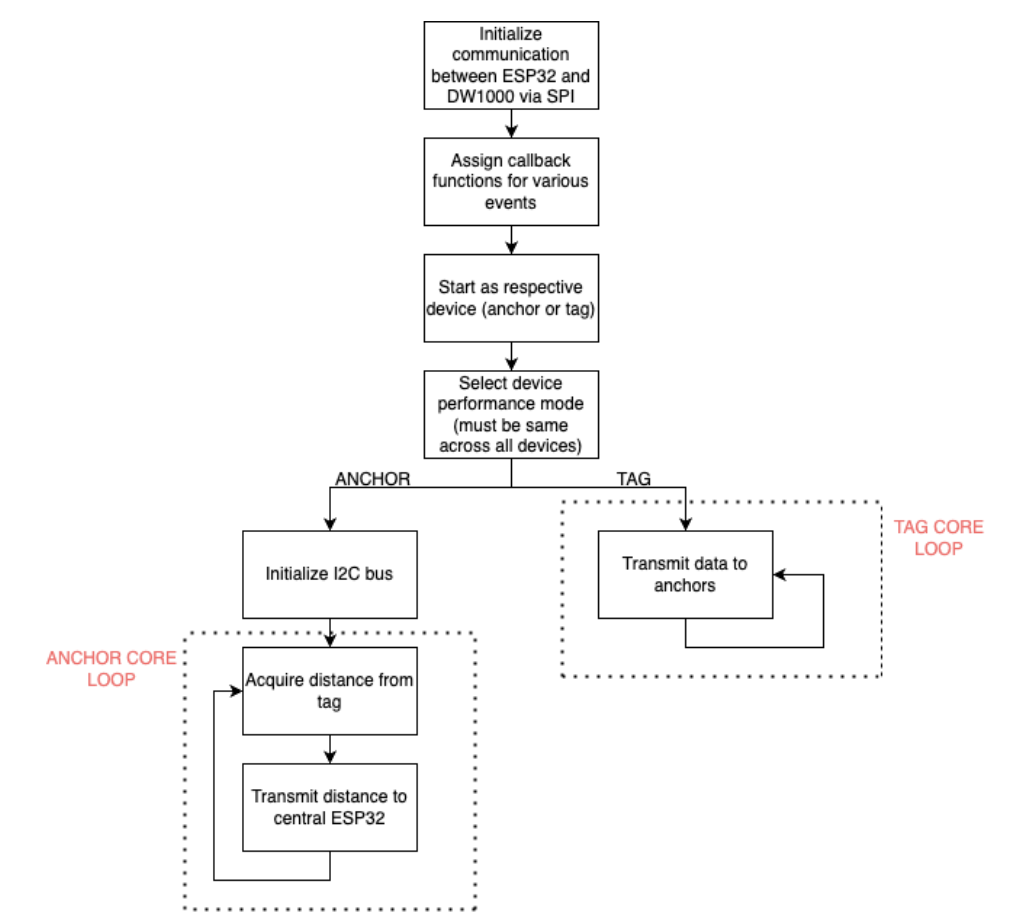
UWB software architecture of system